다양한 형태의 사이클로콥터 설계, 개발, 시험 운전으로부터 얻은 자료를 토대로 안정적인 제자리 비행과 저속 수평비행을 목표로 쿼드로터 형태의 사이클로콥터를 설계했고 여러번의 시행착오 끝에 개발에 성공하게 되었다.
4개의 로터를 배치했고 각 로터당 4개의 피치 각 조절 가능한 블레이드를 장착했고 비행체의 무게는 약 13 kg이었다. 2012년 10월 경, 처음으로 안정적으로 제자리 비행을 성공했다. 그 후 부차적인 개선을 통해 세계 최초로 실외 자유 비행에 성공하고, 현재는 제자리 비행 중 기체의 자세 변화 등 기체 기동 성능 향상에 대한 연구가 진행 되었다.
최종으로 개발한 쿼드로터 사이클로콥터의 특징을 요약하면 아래와 같다.
- 로터는 네 개이고, 각 로터에는 또한 네 개의 블레이드가 장착되어 있음
- 블레이드의 형상은 유도항력을 줄이기 위해 타원형 블레이드 채택
- 로터 스포크의 형상은 두 개의 복합재료를 다수의 크로스 멤버로 연결한 형태에서 에어포일 단면을 갖는 반모노코크(Semi-Monocoque) 형태로 구성
- 로터 설계에는 정적·동적 구조해석 및 유동해석을 통해 설계 변수 결정
- 순간 최대 출력 8마력의 브러시리스 모터 및 리튬폴리머 배터리 장착

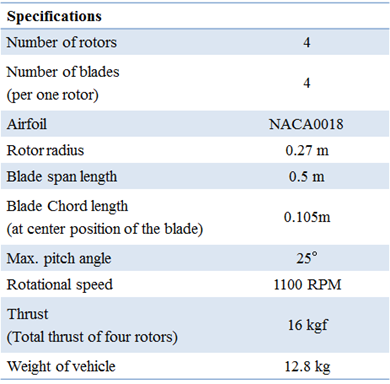
<사진/표> 13kg급 쿼드로터 사이클로콥터 및 그 제원

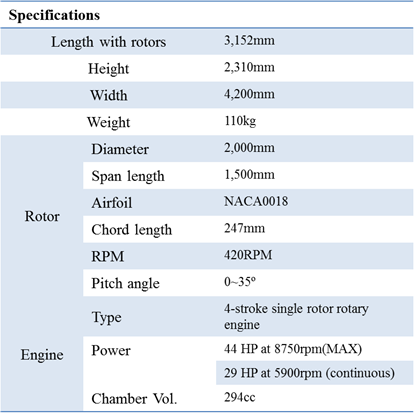
<사진/표> 110kg급 2-로터 사이클로콥터 및 그 제원
MBN에서 방송한 신개념 수직이착륙기인 싸이클로콥터 비행성공 관련 링크 입니다.
2013년 2월 27일 한국형 수직이착륙 비행장치인 싸이클로콥터(Cyclocopter)가 공개 비행실험을 성공적으로 마쳤습니다.
싸이클로콥터는 서울대학교 항공우주구조연구팀(김승조 교수)에서 연구 개발중이던 비행장치로,Cycloidal Blade System을 이용한 4개의 날개로 자유자재로 하늘을 이동할 수 있는 장치입니다.
(이하 시연 모습)




댓글 없음:
댓글 쓰기